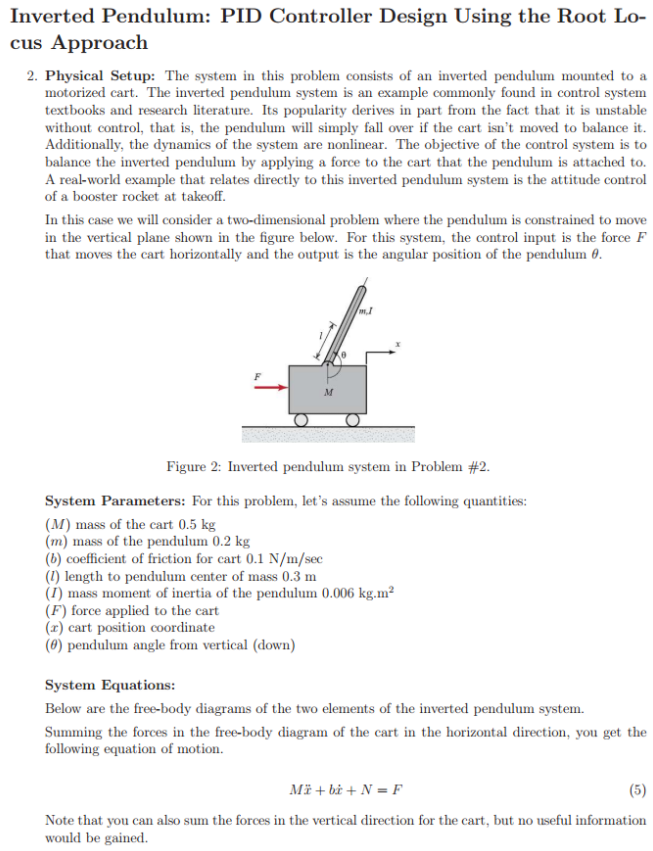
Schematic drawing of the inverted pendulum. Hello everyoneIn this instructable Ill show you how to build a small self-balancing robot that can move around avoiding obstacles.

Figure 2 From Optimal Control Of Nonlinear Inverted Pendulum Dynamical System With Disturbance Input Using Pid Controller Lqr Semantic Scholar

Inverted Pendulum With Pid Control Model Download Scientific Diagram
Rotary Inverted Pendulum
Automatic Steering Methods for Autonomous Automobile.
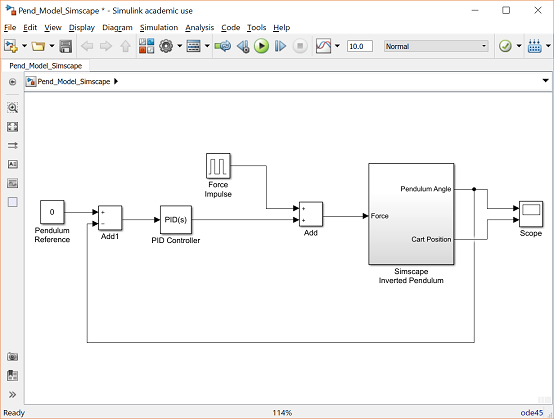
Inverted pendulum pid control. I have used vector control for both. The conventional PID controller does not give me satisfactory closed-loop. The blocks in the Simscape library represent actual physical components.
Banish 1 or more DARK monsters from your GY then target 1 DARK Xyz Monster you control. 三直线型一阶倒立摆模型建立 一级倒立摆系统是一个不稳定的系统需要对其进行机理建模 在研究过程中应忽略空气摩擦等而后可将倒立摆系统进行抽象化认为其由小车和匀质刚性杆两部分组成并对这两部分进行如图所示的受力分析其中为小车的质量和摆杆的质量bF 和 x分别为. In this section we show how to build the inverted pendulum model using the physical modeling blocks of Simscape Multibody.
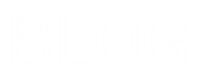
Pendulum angle never more than 005 radians from the vertical. You can set the footsteps and the planner will modify those automatically. Feedback occurs when outputs of a system are routed back as inputs as part of a chain of cause-and-effect that forms a circuit or loop.
Control System Toolbox provides algorithms and apps for systematically analyzing designing and tuning linear control systems. Rashwan Domenec Puig Valls. In this page we will design a PID controller for the inverted pendulum system.
However with the state-space method we are more readily able to deal with a multi-output system. Linearquadratic regulator LQR speed and steering control. A PID BASED ANFIS FUZZY CONTROL OF INVERTED PENDULUM ON INCLINED PLANE IPIP Download.
5 pages Accepted for The 6th International Conference on Mechatronics and Robotics Engineering ICMRE 2020. International Journal of Engineering and Advanced Technology IJEAT covers topics in the field of Computer Science Engineering Information Technology Electronics Communication Electrical and Electronics Electronics and Telecommunication Civil Engineering Mechanical Engineering Textile Engineering and all interdisciplinary streams of Engineering Sciences. 369 Matlab-Assignments Vision-based pest detection based on SVM classification method Download.
You can specify your system as a transfer function state-space zero-pole-gain or frequency-response model. Rear wheel feedback control. The inverted pendulum is a classic problem in dynamics and control theory and is widely used as a benchmark for testing control algorithms PID controllers state space representation neural networks fuzzy control genetic algorithms etc.
Or stabilize an unstable operating condition such as balancing an inverted pendulum. Otherwise stated we will attempt to control the pendulums angle without regard for. Open-loop or feed-forward approaches cannot do this.
The controller needs to keep the pendulum upright while moving the cart to a new position or when the pendulum is nudged forward impulse disturbance. We will give specific examples of modifying dynamics through feedback in Section 45. Simple causal reasoning about a feedback system is difficult because the first system influences the second and.
Special Summon from your Extra Deck 1 The Phantom Knights Raidraptor or Xyz Dragon Xyz Monster whose Rank equals that of the targeted monster you control the number of monsters banished by using it as material also for the rest of this turn after this card resolves you. Path tracking simulation with Stanley steering control and PID speed control. During the Main Phase.
The system can then be said to feed back into itself. 368 Matlab-Simulink-Assignments AN ISOLATED STAND ALONE HYBRID MULTI-PORT DC-DC CONVERTER FOR AN ENERGY HARVESTING DRIVE APPLICATION Download. The notion of cause-and-effect has to be handled carefully when applied to feedback systems.
Linearization around the point θ π textstyle theta pi and substitution of θ θ π textstyle theta theta -pi from here on in the analysis θ textstyle theta will be written as θ textstyle theta but it should be noted that θ textstyle theta now measures from a new reference leads to. The robot that won the DARPA grand challenge. Therefore complex multibody dynamic models can be built without the need to build mathematical equations from physical principles as was done by applying Newtons laws to generate.
Path tracking simulation with rear wheel feedback steering control and PID speed control. This is a bipedal planner for modifying footsteps for an inverted pendulum. The unstable nature of the plant makes the control task more challenging.
The upright position is an unstable equilibrium for the inverted pendulum. Armin Masoumian Pezhman kazemi Mohammad Chehreghani Montazer Hatem A. The inverted pendulum theory can be used as it shares much of the theory.
Package Pair Programming Parse Pass Platform Program Proxy Pull Push Recursion Redirect Redundancy Release Release Version Remote Repository Repository Request Response Resume RETURN Runtime program Server Source Sprint Stand-Up State Streaming Task Ticket Tech Stack Test Testing Test Coverage Test-Driven Development Test Suite Terminal Shell Time Complexity Transition. Designing and Analyzing the PID and Fuzzy Control System for an Inverted Pendulum Authors. Therefore for this section of the Inverted Pendulum example we will attempt to control both the pendulums angle and the carts position.
Path tracking simulation with LQR speed and steering control. For flow control applications an example is keeping a laminar flow stable beyond its usual transition point. This is a tiny robot measuring 4 inches wide and 4 inches tall and is based on the Arduino Pro Mini development bo.
In the design process we will assume a single-input single-output plant as described by the following transfer function. A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles.
1
Solved Inverted Pendulum Pid Controller Design Using The Chegg Com
Control Tutorials For Matlab And Simulink Inverted Pendulum Simulink Control
Automatic Control Theory Linear Inverted Pendulum All Metal Machining Single Inverted Pendulum Pid Y Tool Parts Aliexpress
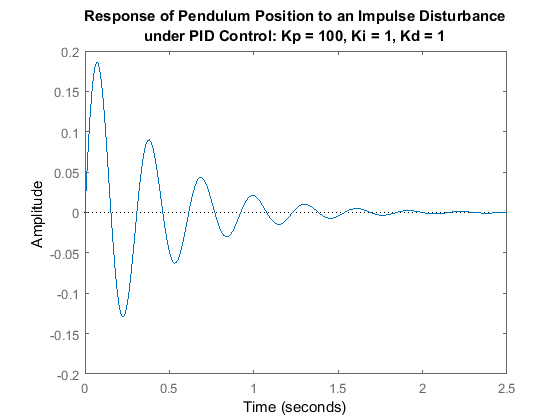
Control Tutorials For Matlab And Simulink Inverted Pendulum Pid Controller Design
Control Block Diagram Close Loop Of The Inverted Pendulum Robot Download Scientific Diagram

Eee Project 3 Ga Optimized Pid Controller For Inverted Pendulum Youtube

Simulation Studies Of Inverted Pendulum Based On Pid Controllers Sciencedirect





